
Simulink nos permite dibujar el diagrama de bloques del enunciado, y con el, mediante unos comando visualizaremos el error en el estado estacionario, este error se puede calcular mediante la gráfica resultante o matemáticamente.
Para montar el diagrama de bloque los objetos se cogen de:
- math operations
- function transfer: Para coger G1 y G2
- source: Entradas
- sink:Para Scoope(sirve para visualizar la respuesta)
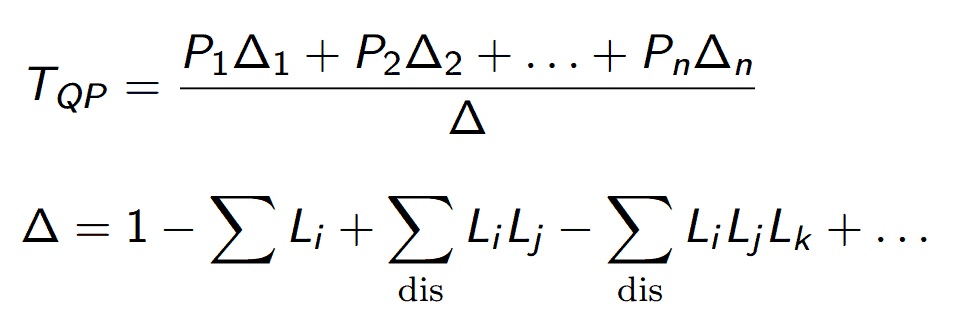
El planteamiento teórico:

Todo esto se resume en esto:

Debido al enunciado sabemos que H es = 1 y solo quedaría calcular G, G es igual al producto de G1(s), G2(s) y k. Realizando esto queda:
\[
G=\frac{12}{s-5}*\frac{s^2+4s+3}{s^2+2s+5};H=1
\]

Por gráfico también se podría calcular:
 |
| Para visualizar este gráfico hay que clicar en Scoope y posteriormente dar a simulation start |
Ess= 1 - 3,27= -2,27
Comprobamos que el resultado sea el mismo al hecho teoricamente y vemos que es el mismo, por lo tanto está hecho correctamente.













{kind=link}
{kind=link}